這樣要多一個舵機的控制喲,原版的設計比較好咧,只用一個舵機連動來操作。為何要更改設計呢?有什麼特殊原因嗎?影片有問題?
原版在設計上有兩個小缺點第一當然就是齒輪的牙真的很不容易做這樣的修改雖然要多一個舵機卻可省去很多加工時間第二就是傳動臂很容易斷傳動臂的原始設計是一個圓加一個柄銜接的位置剛好是應力集中的地方只要施力稍有不當傳動臂就斷了!!所以才進行這樣的修改如果單純直接修改傳動臂的外觀會發生干涉的情況我之前在試動作的時候發現這個問題所以才一倂進行修正再來原始的舵機因為同時要控制兩個自由度的機構需要比較大的扭力而且手掌的重心是偏一邊的動作時的擺動會更明顯改成這樣會比較好一些感謝大大的回應有任何修改上的建議也請不吝指教唷~~~對了影片的部分看看大大您的防火牆有沒有擋我剛剛試了一下應該是可以看的唷~~~^+++++^
那兩個舵機給的訊號剛好相反嘍。
可以這麼說~~但因為組裝跟SERVO本身的定位誤差所以送的訊號沒有很對稱會差一點點
版主的舵機pwm解析度是多少呢? 0.5-2.5ms可調多少數值呢?
我是用之前所寫的程式來測的解析是256段可以參考一下控制篇的說明
請問可以給我你設計的夾具驅動臂1:1的圖嗎?因為我覺得自己設計的可能會有些誤差。
可以呀~~您的信箱是?
yam4050@yahoo.com.tw摁 非常謝謝你^^我們要以手臂為我們的專題要參加學校科展可能會有很多的問題想請你指教我們的手臂中下部分已經非常的穩固但是原上部分一顆馬達的夾具還是很粗糙因為現在時間很緊迫可以請問有什麼快速的方法可以連絡你是否做模具有哪些訣竅可以請教
先問一下機構的部分你們是手工處理還是發件請人做?我的圖並沒有很準因為要配合我所使用的SERVO所以尺寸上會修修整整至於夾具的部分除了手掌及傳動臂需要修改其它的都不用改傳動臂的部分只要確定兩個孔中心距離跟原來一樣大圓的部分可以鎖上你的servo那麼斜度多寡並不重要手掌的部分如果是用壓克力做第一會遇到的就是厚度跟韌度的問題太薄在動的時候就要很小心不然很容易斷太厚又會太重而導致servo動作時很會搖所以我才會改用紙來做如果真的時間很趕那我可以直接把我的機構寄給你參考你再試著自己做做看細節的部分請多看幾次我放在blog上的文章全部都是重點就這樣啦~~~又servo力量不大最多夾夾紙杯或原子筆前端的部分一直沒空處理要加個防滑墊跟立掌這樣才容易夾預祝你們科展順利~~~
謝謝我已經寄到您信箱了 ^^
我有用gmail寄給您圖片機構跟工具今天會找時間寄出收到時線鋸可能要稍微先除鏽一下而刀片有備用的在刀身裡加油囉~~~
我也想要這個部份的機構圖可以麻煩寄到我的信箱嗎?感謝wadeshrimp@gmail.com
已經mail過去囉~~~可以請教一下您要做啥用途呢?
自己有興趣而且有個的比賽想參加所以自己先做做看感謝
那書你有了嗎?建議你要自己再畫過唷印刷多少都會有點誤差的有時候孔位會對不起來最好是自己再畫過或是加工時先確認孔位的相對位置是對的再做祝你順利囉~~~
請問我可以跟你要這個機械手臂的設計圖嗎?我想用紙來做,可能會加輪子讓他跑@@我的信箱piopiox2@yahoo.com.tw感恩!
這個手臂我沒有設計圖耶!因為是書上附的只有夾具的部分是自己畫的您可以參考一下網誌上的文章有提到是哪一本書及相關的作法不好意思最近比較忙所以晚了點回覆
還滿詳細的耶,專題有需要到時候遇到問題可以在這裡問嗎?一直找不到方向製作,可是看你弄得好像又不難老師每個禮拜都要meeting都覺得壓力好大...
基本上程式的部分要自己消化過再重寫因為我用的MCU跟書上的不太一樣雖然都是51的晶片但是架構上差很多建議是先跟著書上的做一遍再依自己的需求去修正有問題歡迎來這裡留言唷~~~
那設計的時候會用到機構學的觀念嗎?程式部分比較懂就是設計上不知道該怎麼設計只要參考你買的那本書就OK了嗎?
連機構都要自己設計嗎?如果可以用現成的再自己寫程式的話那你可以找小鯨魚幫你的忙機構該有的他都有不過如果要自己設計的話書上應該是沒有講到太多他算是工具書就是讓你按圖施工的書所以你要做的就是把圖照畫下來然後照著放到材料上把材料切好再把SERVO組裝上去不行的地方就東補一點西補一點這樣就能完成雛形再看看自己機構哪裡要修正重新再做一次再來才是寫程式做這東西基本上要有興趣如果只是為了交專題那可能會是很辛苦的經歷(每天靜下心來2~3小時加工, 兩週才看得到雛形)
恩恩,謝謝你,明天就要加工了,拼看看囉有問題在麻煩你教了
試了就會啦這個不用教的~~^^
可是這修正篇怎麼跟你做的東西不太一樣啊?
修正篇就是我自己把書上的機構改掉了不過因為多了一個軸所以程式也要跟著做一些小調整建議你把文章內的回覆也看一看吧大多數人會發生的問題在回覆裡有提到唷~~~
我們把書上原來的機構簡化成三軸相對的經費與時間都省下許多所以老師要求我們要讓他可以做到四軸以上機構可以辦到的工作可是我並沒有實際看過機械手臂也不知道它可以做到什麼所以想請問一下有沒有什麼方向是我可以參考的?另外我們的機械手臂是要採收果子專用的
機械手臂就是要用來取代人類手臂的所以你的手可以做啥理論上機械手臂就可以做啥往這個方向思考就OK囉~~~相關的參考資料只要去google打關鍵字"機械手臂"就可以看到一堆人家做的東西建議在youtube上看一下人家的作品再思考自己該朝什麼方向去下手吧!!祝你順利
那你的呢?我想知道你花了約半個月時間做出來的手臂可以幹什麼方便透露嗎老實說我們信心已經有點崩盤了老師跟學長都說時間不夠我看著你的網誌半個月就完成之前還鬆了一口氣現在都鬆不起來了....
我的手臂就是可以用程式控制進行反覆式的動作 (人的手會酸, 機器不會....)比方說把東西從A放到B如果基本功夠紮實兩三天就可以完成了基本功有幾個重點第一要會畫圖並懂得加工流程第二要會製作電路板並程式化第三要會寫PC端的人機介面以上三樣能力都要具備才有獨力完成這個手臂的機會不過也不用太早放棄因為缺哪一樣可以請人幫忙先完成那一樣自己做會的那部分就好例如你會寫PC程式那麼就去買完整的機械手臂可以下指令命令它動作的再來自己訓練自己寫PC程式去控制(這是最簡單的開始)如果會寫單晶片畫電路那就買不含控制板的機構自己完成馬達動作(這是比較進階的)再來就是像我這樣從機構到控制板到人機端都自己來依實驗階段來看做到我這樣就算OK了....要產品化還要加很多步驟
另外我想問一下你的手臂有加裝感測器嗎?
我沒有加感測器因為沒有做智能動作的規劃這樣會讓動作變複雜控制板就不能做得很簡單了
其實本來我們專題想說是要學設計電路和程式沒想到居然要自己做機構這是大大出乎意料之外的
這不應該是出乎意料的事吧?如果不是自己做機構的話就是買現成的機構並不衝突呀!!放輕鬆點這套機構本來就有人賣整組現成的了!!http://tw.myblog.yahoo.com/robot-whale/article?mid=5&prev=6&next=2&l=f&fid=6如果要簡化也可以用訂做的不用擔心這樣的問題啦!
我知道有現成的呀只是老師要求我們要自己做設計這條路真的好辛苦要懂好多東西想照圖老師又嫌沒創意看樣子專題要發表有得拼了...
設計需要很大的興趣支持如果只是為了文憑或工作那壓力會很大也不容易有成就感......加油囉~~
這樣要多一個舵機的控制喲,原版的設計比較好咧,只用一個舵機連動來操作。
回覆刪除為何要更改設計呢?有什麼特殊原因嗎?
影片有問題?
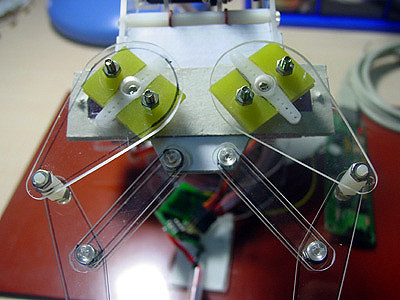
原版在設計上有兩個小缺點
刪除第一當然就是齒輪的牙真的很不容易做
這樣的修改雖然要多一個舵機
卻可省去很多加工時間
第二就是傳動臂很容易斷
傳動臂的原始設計是一個圓加一個柄
銜接的位置剛好是應力集中的地方
只要施力稍有不當
傳動臂就斷了!!
所以才進行這樣的修改
如果單純直接修改傳動臂的外觀
會發生干涉的情況
我之前在試動作的時候發現這個問題
所以才一倂進行修正
再來
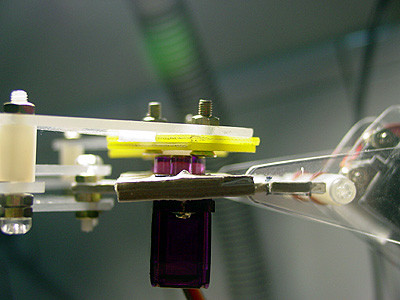
原始的舵機因為同時要控制兩個自由度的機構
需要比較大的扭力
而且手掌的重心是偏一邊的
動作時的擺動會更明顯
改成這樣會比較好一些
感謝大大的回應
有任何修改上的建議也請不吝指教唷~~~
對了
影片的部分
看看大大您的防火牆有沒有擋
我剛剛試了一下
應該是可以看的唷~~~
^+++++^
那兩個舵機給的訊號剛好相反嘍。
回覆刪除可以這麼說~~
刪除但因為組裝跟SERVO本身的定位誤差
所以送的訊號沒有很對稱
會差一點點
版主的舵機pwm解析度是多少呢?
回覆刪除0.5-2.5ms可調多少數值呢?
我是用之前所寫的程式來測的
刪除解析是256段
可以參考一下控制篇的說明
請問可以給我你設計的夾具驅動臂1:1的圖嗎?
回覆刪除因為我覺得自己設計的可能會有些誤差。
可以呀~~
刪除您的信箱是?
yam4050@yahoo.com.tw
回覆刪除摁 非常謝謝你^^
我們要以手臂為我們的專題要參加學校科展
可能會有很多的問題想請你指教
我們的手臂中下部分已經非常的穩固
但是原上部分一顆馬達的夾具還是很粗糙
因為現在時間很緊迫
可以請問有什麼快速的方法可以連絡你
是否做模具有哪些訣竅可以請教
先問一下
刪除機構的部分你們是手工處理還是發件請人做?
我的圖並沒有很準
因為要配合我所使用的SERVO
所以尺寸上會修修整整
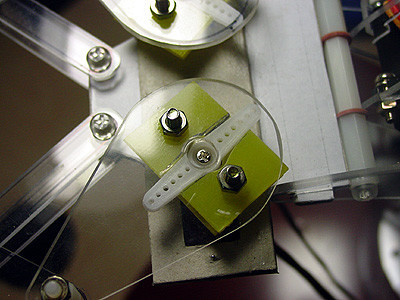
至於夾具的部分
除了手掌及傳動臂需要修改
其它的都不用改
傳動臂的部分只要確定兩個孔中心距離跟原來一樣
大圓的部分可以鎖上你的servo
那麼斜度多寡並不重要
手掌的部分
如果是用壓克力做
第一會遇到的就是厚度跟韌度的問題
太薄在動的時候就要很小心
不然很容易斷
太厚又會太重而導致servo動作時很會搖
所以我才會改用紙來做
如果真的時間很趕
那我可以直接把我的機構寄給你參考
你再試著自己做做看
細節的部分請多看幾次我放在blog上的文章
全部都是重點
就這樣啦~~~
又
servo力量不大
最多夾夾紙杯或原子筆
前端的部分一直沒空處理
要加個防滑墊跟立掌
這樣才容易夾
預祝你們科展順利~~~
謝謝
回覆刪除我已經寄到您信箱了 ^^
我有用gmail寄給您圖片
刪除機構跟工具今天會找時間寄出
收到時線鋸可能要稍微先除鏽一下
而刀片有備用的在刀身裡
加油囉~~~
我也想要這個部份的機構圖
回覆刪除可以麻煩寄到我的信箱嗎?
感謝
wadeshrimp@gmail.com
已經mail過去囉~~~
刪除可以請教一下您要做啥用途呢?
自己有興趣
回覆刪除而且有個的比賽想參加
所以自己先做做看
感謝
那書你有了嗎?
刪除建議你要自己再畫過唷
印刷多少都會有點誤差的
有時候孔位會對不起來
最好是自己再畫過
或是加工時先確認孔位的相對位置是對的再做
祝你順利囉~~~
請問我可以跟你要這個機械手臂的設計圖嗎?
回覆刪除我想用紙來做,可能會加輪子讓他跑@@
我的信箱piopiox2@yahoo.com.tw
感恩!
這個手臂我沒有設計圖耶!
刪除因為是書上附的
只有夾具的部分是自己畫的
您可以參考一下網誌上的文章
有提到是哪一本書及相關的作法
不好意思最近比較忙
所以晚了點回覆
還滿詳細的耶,專題有需要
回覆刪除到時候遇到問題可以在這裡問嗎?
一直找不到方向製作,可是看你弄得好像又不難
老師每個禮拜都要meeting都覺得壓力好大...
基本上程式的部分要自己消化過再重寫
刪除因為我用的MCU跟書上的不太一樣
雖然都是51的晶片
但是架構上差很多
建議是先跟著書上的做一遍
再依自己的需求去修正
有問題歡迎來這裡留言唷~~~
那設計的時候會用到機構學的觀念嗎?
回覆刪除程式部分比較懂
就是設計上不知道該怎麼設計
只要參考你買的那本書就OK了嗎?
連機構都要自己設計嗎?
刪除如果可以用現成的再自己寫程式的話
那你可以找小鯨魚幫你的忙
機構該有的他都有
不過如果要自己設計的話
書上應該是沒有講到太多
他算是工具書
就是讓你按圖施工的書
所以你要做的就是把圖照畫下來
然後照著放到材料上把材料切好
再把SERVO組裝上去
不行的地方就東補一點西補一點
這樣就能完成雛形
再看看自己機構哪裡要修正
重新再做一次
再來才是寫程式
做這東西基本上要有興趣
如果只是為了交專題
那可能會是很辛苦的經歷
(每天靜下心來2~3小時加工, 兩週才看得到雛形)
恩恩,謝謝你,明天就要加工了,拼看看囉
回覆刪除有問題在麻煩你教了
試了就會啦
刪除這個不用教的~~
^^
可是這修正篇怎麼跟你做的東西不太一樣啊?
回覆刪除修正篇就是我自己把書上的機構改掉了
刪除不過因為多了一個軸
所以程式也要跟著做一些小調整
建議你把文章內的回覆也看一看吧
大多數人會發生的問題
在回覆裡有提到唷~~~
我們把書上原來的機構簡化成三軸
回覆刪除相對的經費與時間都省下許多
所以老師要求我們要讓他可以做到四軸以上機構可以辦到的工作
可是我並沒有實際看過機械手臂也不知道它可以做到什麼
所以想請問一下有沒有什麼方向是我可以參考的?
另外我們的機械手臂是要採收果子專用的
機械手臂就是要用來取代人類手臂的
刪除所以你的手可以做啥
理論上機械手臂就可以做啥
往這個方向思考就OK囉~~~
相關的參考資料只要去google打關鍵字"機械手臂"
就可以看到一堆人家做的東西
建議在youtube上看一下人家的作品
再思考自己該朝什麼方向去下手吧!!
祝你順利
那你的呢?
回覆刪除我想知道你花了約半個月時間做出來的手臂可以幹什麼
方便透露嗎
老實說我們信心已經有點崩盤了
老師跟學長都說時間不夠
我看著你的網誌半個月就完成
之前還鬆了一口氣
現在都鬆不起來了....
我的手臂就是可以用程式控制
刪除進行反覆式的動作 (人的手會酸, 機器不會....)
比方說把東西從A放到B
如果基本功夠紮實
兩三天就可以完成了
基本功有幾個重點
第一要會畫圖並懂得加工流程
第二要會製作電路板並程式化
第三要會寫PC端的人機介面
以上三樣能力都要具備
才有獨力完成這個手臂的機會
不過也不用太早放棄
因為缺哪一樣可以請人幫忙先完成那一樣
自己做會的那部分就好
例如你會寫PC程式
那麼就去買完整的機械手臂
可以下指令命令它動作的
再來自己訓練自己寫PC程式去控制
(這是最簡單的開始)
如果會寫單晶片畫電路
那就買不含控制板的機構
自己完成馬達動作
(這是比較進階的)
再來就是像我這樣
從機構到控制板到人機端都自己來
依實驗階段來看
做到我這樣就算OK了....
要產品化還要加很多步驟
另外我想問一下
回覆刪除你的手臂有加裝感測器嗎?
我沒有加感測器
刪除因為沒有做智能動作的規劃
這樣會讓動作變複雜
控制板就不能做得很簡單了
其實本來我們專題想說是要學設計電路和程式
回覆刪除沒想到居然要自己做機構
這是大大出乎意料之外的
這不應該是出乎意料的事吧?
刪除如果不是自己做機構的話
就是買現成的機構
並不衝突呀!!
放輕鬆點
這套機構本來就有人賣整組現成的了!!
http://tw.myblog.yahoo.com/robot-whale/article?mid=5&prev=6&next=2&l=f&fid=6
如果要簡化
也可以用訂做的
不用擔心這樣的問題啦!
我知道有現成的呀
回覆刪除只是老師要求我們要自己做
設計這條路真的好辛苦
要懂好多東西
想照圖老師又嫌沒創意
看樣子專題要發表有得拼了...
設計需要很大的興趣支持
刪除如果只是為了文憑或工作
那壓力會很大
也不容易有成就感......
加油囉~~