完成了!!
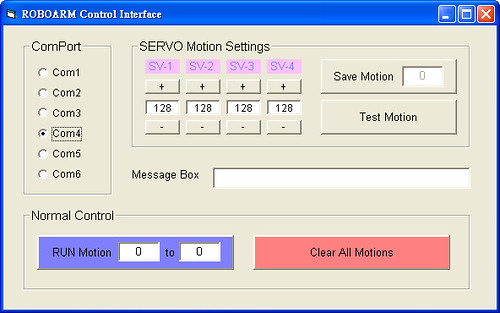
VB6的界面
原始程式下載
操作的方法很簡單
就是用[+]跟[-]調整SERVO的位置
用test motion看一下是不是自己要的
再按一下save motion
這樣就可以了
要執行的話
按一下run motion XXX to XXX
就可以執行已經儲存好的設定
最後如果要更新動作
就按一下clear all motions
再重新儲存motion
這樣就大功告成了
目前每一個動作的時間間隔是0.25秒
要增加停頓的時間
就把該動作連續存幾次就可以了
照慣例要來個影片
請笑納
ps1.
不要太期待會有很穩定的動作
因為SERVO本身光是送固定寬度的PWM就已經抖個不停
更別提要連續改變SERVO的角度
應該是慘不忍睹的
參考一下就好了~~~~
ps2.
程式其實有預留一些函數沒有呼叫
包含將動作存到檔案
漸進式傳送角度的功能
這些都還沒掛上
所以看動作的時候會比較粗糙
晃動也比較利害
大大真是神,三個禮拜就完成一般人要好幾年的功力。真是太……了。
回覆刪除您過獎了
刪除小弟也是練了好幾年功夫
才開始做機器人的~~~
再加上現在網路真的很發達
上網找資料有很多可以參考的文件
消化吸收一下
應該不難完成的!
您也要試試看唷~~~
大哥真的很厲害(拍拍手
回覆刪除雖然有點晃XD
不過能做到這樣
已經很不簡單的啊
晃動真的很難克服
刪除因為馬達一通電自己就會抖了
不會乖乖停著
謝謝你的鼓勵呀~~