電源的管制是越重要的
高階的SERVO會把電源的穩定性考慮進去
因而內建限流及穩壓的線路
但低階SERVO為了成本考量
在這方面的設計就變得比較粗糙
我們常抱怨的馬達抖動
很可能是在電源變動時造成的
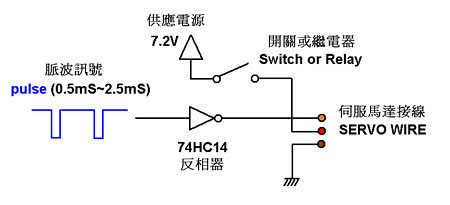
這是一個控制電路的示意圖
以8051來說
剛開機時的輸出一定是High(高位準)
透過反相器可以避開假信號所造成的誤動作(另一個抖動的原因)
不過信號要改成圖中反相送出的方式
電源端加上一個開關
是為了避開之前所提到的
當同時很多SERVO一起通電
會降低供應電壓
導致MCU的電壓不足
而當機發生誤動作
但是
如果您採用分開電源的管理
就是將MCU控制端與馬達出力端的電源分開
那這個影響就比較小
可以再省下開關元件(但就會多一組電源)
由於我的手臂有六個SERVO
而7414剛好也有六組反相器
不然單一SERVO可以用電晶體取代就好
這樣的電路設計
其實是針對目前我所用的SERVO所規劃
有些高階的SERVO只要單純灌一組pulse就可以了
其它都不用考慮
一分錢一分貨啦!!!
我有問到伺服馬達 大約廣營電子S03T-2BB型 320一顆
回覆刪除高雄市
艾飛者模型
07-3858075.095826423
高雄市三民區春陽街29號
鄭舜仁
謝謝您的提供
刪除這是不錯的價格唷~~~
可以買來試試看
如果是2BBMG
一個就要550了!!
依這個打折來看
也要440才買得到了!!
對了
再提供一間西洋城給您參考
在中山路民生路的圓環那邊
美利達自行車的對面!!
是賣伺服馬達的嗎??
回覆刪除是賣模型的
刪除也有賣SERVO
剛開始作,其實買S03T - STD 就好了!
回覆刪除跟其他的版本插在軸承、齒輪材質。 S03T - STD 一顆才235。
今天有看到利基的「鐵蛋」機器人,穩定度好高、順暢不抖動。
採用的是祥儀的馬達、利基的版子。
感謝分享電源控制的心得和教學。
我也看過鐵蛋
刪除好重一隻!!
但動作寫得很好!!
價格兩萬應該是物超所值~~~
請示一下,hc和LS的ic為什麼這樣考量呢?
回覆刪除反相後,原來的pwm不就沒用了嗎?謝謝嘍。
剛開機的時候
刪除8051所有的預設腳位是high
當reset後把它強制初始化為low
此時就已經送出一個PWM出去了!
SERVO收到這個假信號之後
就會發生誤動作!!
原來的PWM改為反相輸出後
再經過反相器會"正"回來
所以一啟動時不會有假信號
而後來繼續送就可以開始正確動作
這就是加上反相器的用意!!
如果您的MCU沒有啟動問題
就是一開始是浮接而不是high
只要確保您的外部電路是pull down
那就不用特地接這樣的電路了
不過
pull down的電路設計
推動力會有點問題
所以最好的方法還是用這個電路
對系統來說會比較穩定
又
HC與LS是差別在耗電量與反應電壓
功能是完全一樣的
謝謝解惑唷,那也就是電路還要加上一個反相器,可是在圖上沒看到,故有此問啦。
回覆刪除那請問hct的ic又如何解釋呢?
其實您可以參考一下datasheet的說明
刪除HC是指工作電壓在DC2.0~6.0V
而HCT工作電壓在DC4.5~5.5V