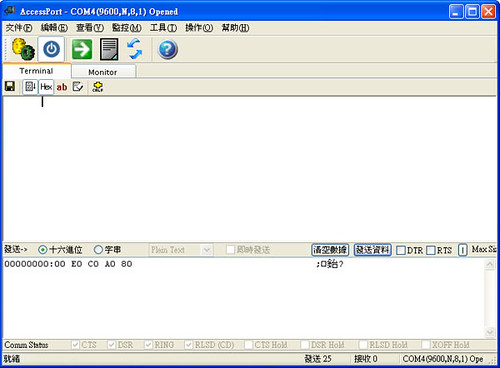
先從改變一個SERVO的信號開始就好
在AccessPort上鍵入"00" "FF"
再按下[發送資料]
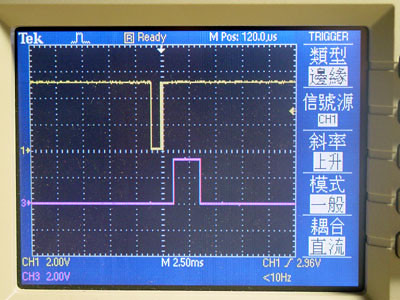
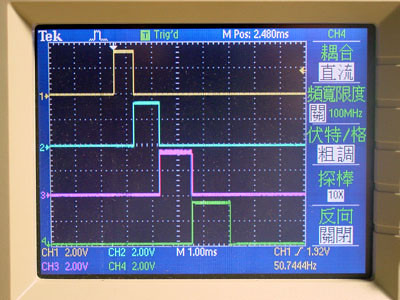
在示波器上會看到這樣的波形
黃色是UART的信號
而粉紅色是PWM改變後的寬度
這樣看也許體會不到
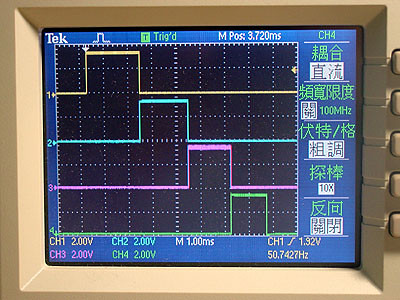
再看一張送"00" "01"的圖
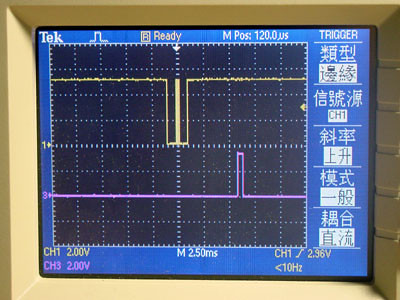
有看到了嗎?
SERVO的PWM寬度明顯縮小了!!!
有發現我送信號都是送"00" "XX"嗎?
這就是在程式中加入歸零的好處
我可以每次都改變SERVO1的PWM就好
不用一次都改變四個SERVO的值
當然如果要改到後面的SERVO還是要四個一起送
但在測試時
這樣就可以節省不少時間唷~~~
不過通訊碼當然不能只是這麼簡單
未來改版再慢慢考慮編碼的問題
現下先讓信號正確就好
接下來把SERVO1~4的測棒都接上
實際看一下信號的改變
在這裡所輸入的數值都是16進位的唷
請自行用工程型的小算盤換算一下
看到了嗎?
四組SERVO的信號改變了!!!
再換一組數值看看
不錯吧!!
連線成功~~~~
可以開始撰寫pc的操作介面了!!!
ps.
記得剛剛說過的嗎?
不要急躁!!
如果現在你急著接到SERVO上看動作
很可能還是會有災難發生唷~~~
驗證步驟是要按步就班的
今天先到此為止囉!!
沒有留言:
張貼留言