今天的進度比較少
因為在考慮組裝時的一些問題
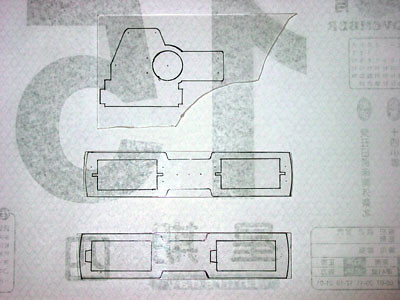
暫時先把加工一半的零件放上來讓大家過過癮
同時也讓大家瞧瞧真的全部是純手工製作
從頭到尾都是同兩張投影片在繪圖
這才發現
書在印刷機構圖時是有誤差的
1:1 對目前即將面臨的機構來說
可能會有動作上的問題!!!
所以在繪圖時要進行小幅度的調整
加工也必須更小心
不然很可能同一個零件要重做好幾遍......
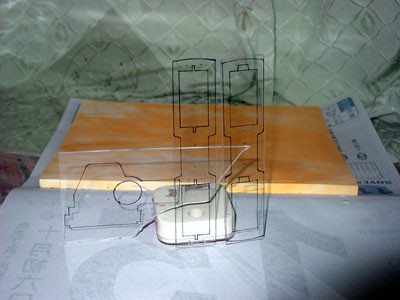
因此
對稱的機構
我會用同一張圖描繪
僅修改些微差異的部分
這樣可以避開原圖誤差的問題
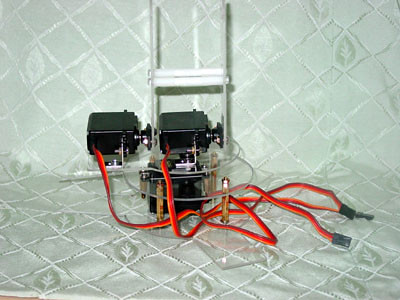
昨天因為沒有塑膠柱
所以今天才把支撐樑給補上
我是用兩個規格的柱體組合的
因為買不到那麼長的柱體
中間的部分是20mm M3 雙母
左右兩邊是15mm M3 標準柱
最外面是兩根塑膠螺絲 M3 -- 8mm
總共要兩組
價格約NT$18
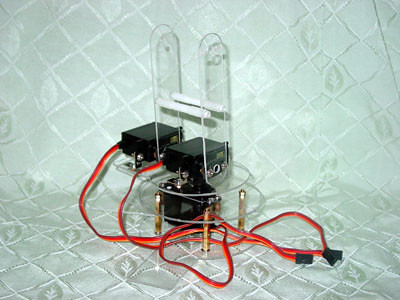
前一張看起來不夠立體
來張立體一點的照片吧
今天比較偷懶
請各位多多見諒.....
最後最後
介紹一個神兵利器

這是大一時候買的
為了上耗時又耗資源的圖學課特地選的
以往有一把工具一直都沒動過
今次亮相登場就有很好的表現
猜猜看是哪一把???

登登登登
就是這一把
用來畫壓克力超好用
先把紋路刻出來
再用簽字筆從上面描過
搞定!!!
還是要給予掌聲的!至少保持每天都有分享進度!
回覆刪除(鼓掌)
加油加油!
再上一天班後
刪除就會有比較多的時間可以趕工
希望這個星期就能把機構組裝完成
快點進入程式控制的階段
目前計畫把原書上的範例改用C來寫
並加入通訊控制的功能
完成後再跟大家分享
進度好快喔,小弟之前也是照那本書做了快兩個禮拜才完成機構而以,然而
回覆刪除用8051送PWM卻一直有問題,也沒示波器可以看訊號對不對,之後就一直停
擺了,看到您的工作進度讓我又燃起希望了.
別氣餒
刪除很多工作是必須先消化後再動手的
遇到問題
先沉澱幾天
並多找些相關的訊息
靈感來時
自然就想通了~~~
給無名氏同學,你用 8051送PWM,你覺得有問題,那有確定過零件的正確
回覆刪除性嗎?還有若你是用 Keil C 去寫,有照書上去設定正確的晶片型號、和
震盪時脈嗎?還有,如果你燒錄的,是SERVO 1 這個程式,他的確只會動
一下,到了你所設定好的定點後,就停止不動了。建議你,把Servo3 這
個程式燒進去,然後直接接上馬達動動看,先不要裝到機構上。
以上小小的建議,試試看囉
感謝Edison幫我回覆
刪除祝Abula同好早日克服問題~~
剛剛發現大大是在高雄旗威科技工作的嗎???
回覆刪除小弟有看過貴公司發表的一些除錯心得的文章,受益不少.
有空可以來我的Blog逛逛交流一下.(PS:我是二樓^^)
是呀~~
刪除歡迎多到我們網站論壇逛逛囉!!
除錯文章有不少是小弟的工作心得
希望對您有幫助
也謝謝您的支持~~
TO 三樓
回覆刪除謝謝您給的建議,我是用servo 1程式去測試的,如你所說的確只是動一下
就停止了,原本我以為它會轉到中立位置才停止,可是似乎不是這樣.我會
去用servo 3跑跑看,謝謝囉!
有結論記得告訴我們唷~~
刪除Abula你好,你的問題我想應該會得到解決的。不過如果馬達和單晶片、
回覆刪除電路都確定正確後,你可能要試著把程式看懂、弄懂,知道怎麼撰寫。這
樣子你的機器人才會有不同的動作和對應。畢竟書上的,只是寫死的範
例,只有弄懂語法和流程,你才能作出靈活度高的機器人喔! 加油!
加油加油~~~
刪除