所以只好自己拼裝
還記得之前介紹的USB轉UART工具嗎?
現在就要透過他來進行連線的測試囉
在這之前要先作個小改裝
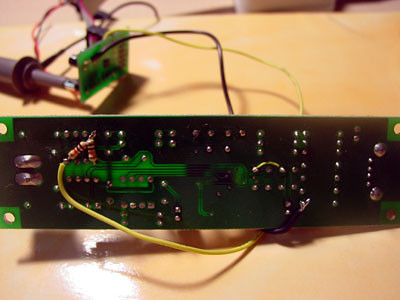
這一張是轉接板要焊上的跳線
記得要把TxD與GND都接上MCU的RxD與GND唷
這樣信號才有參考準位
不然如果只接TxD與MCU的RxD
那是一定不會通的!!!
(會亂入~~~)
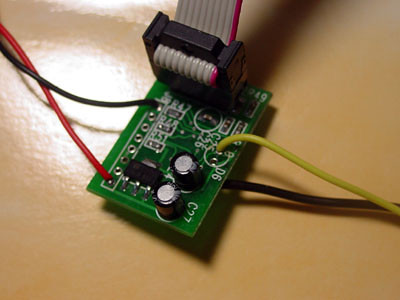
MCU這端的接線就是這樣
有空一點再把線路圖整理出來給大家看
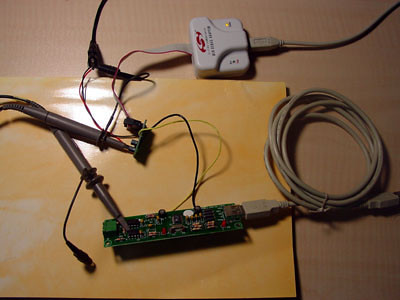
連好之後就像這樣
同時把示波器跟測棒也準備好
到此我們就可以開始進行測試了
在旗威論壇中有介紹一套很好用的[AccessPort]
底下就來試用一下
順便提供一下download的地方好了
[AccessPort下載]
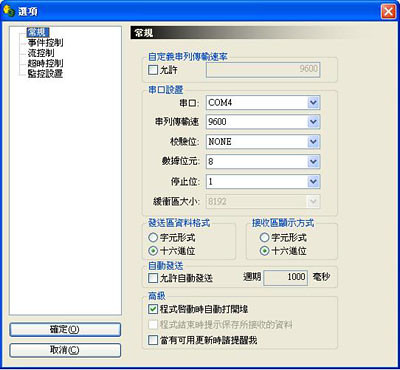
首先要設定一下COMPORT的位址
可以從裝置管理員中的連接埠找到
我的是COM4
所以就選COM4
鮑率按照前一篇程式所設定的9600,N,8,1
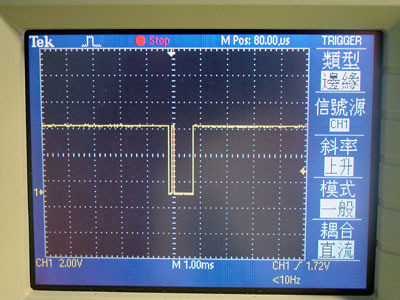
從PC上送出資料後
確認TxD腳位上有信號出來
這樣就算OK了~~~~
接下來要測試SERVO信號囉!!!
ps.
如果您在示波器上看不到這個信號
那有下列幾種可能
1. 示波器的觸發準位設定不對
2. 確認MCU的程式中設定IO狀態是對的, UART的功能有確實被打開
3. 兩邊的GND是否有接上?沒有共地信號是會亂掉的....
4. 其它狀況請回應讓我知道, 我來幫您看看~~~ ^+++++^
沒有留言:
張貼留言